Interface 4G pour la télésurveillance du robot et sa télémaintenance
Autonomie de 45 km de trajet chargé à 80 kg sans interruption et temps de recharge des batteries LiFePO4 en 4 h
Le robot est équipé de 4 roues motrices d’une puissance 1,2 CV avec une locomotion tout-terrain avec une option pour monter/descendre les escaliers.
Le robot transporte des charges lourdes jusqu’à 100 kg sur tout-terrain soit en mode « suis-moi », soit en mode « autonome » soit manuellement avec un joystick.
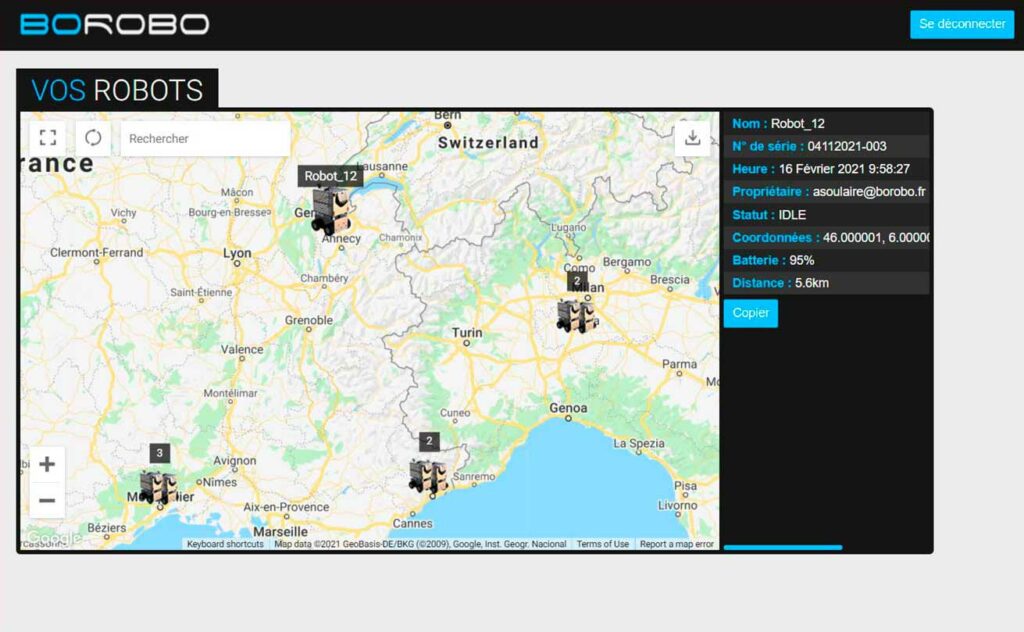
Les utilisateurs peuvent piloter le robot via une APPS et l’administrateur peut aussi suivre sa flotte de robots via un dashboard.
Le robot dispose de nombreux capteurs de proximité, d’une caméra de profondeur et de 2 boutons d’arrêt d’urgence.
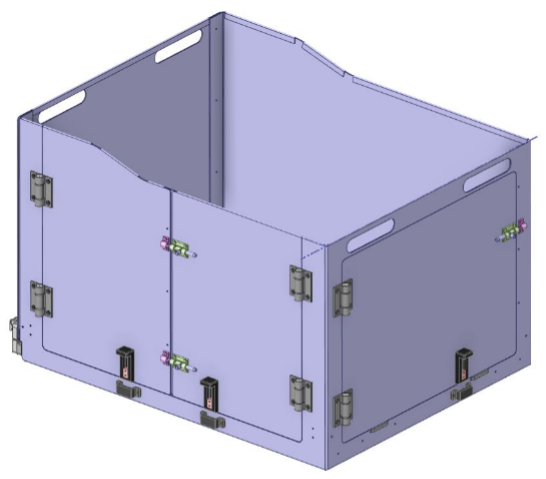
La nacelle « caisse » se fixe sur la plaque mobile (bennage) avec 2 clips à l’avant ce qui facilite son installation et retrait. Cette nacelle permet de transporter différents objets (ex : outils, sacs de ciments, etc.). Elle est lavable à l’eau.
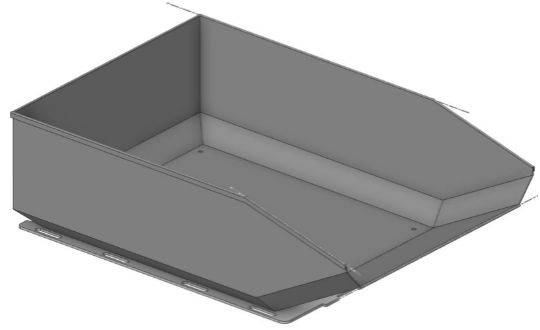
La nacelle « brouette » se fixe sur la plaque mobile (bennage) avec 4 écrous de fixation. Elle permet de transporter différentes matières (ex : terre, sable, liquide, etc.). Elle est lavable à l’eau.

Les potelets sont des dispositifs de support au sol destinés aux AR_TAG qui balisent les itinéraires suivis par le robot HELP-E lors de sa navigation autonome en extérieur. Réglables en hauteur, les potelets sont fournis avec leurs AR_TAG prêts à être montés. Ils doivent être installés sur le bord du chemin balisé à intervalles réguliers de 10 mètres, soit 10 potelets pour chaque segment de 100 mètres parcouru en navigation autonome.