4G interface for remote monitoring and maintenance of the robot.
45 km of continuous travel range with a 80 kg load and a 4-hour LiFePO4 battery recharge time.
The robot is equipped with 4-wheel drive with a power of 1.2 hp and all-terrain locomotion, with the option to climb/descend stairs.
The robot transports heavy loads of up to 100 kg on all terrains, either in "follow me" mode, "autonomous" mode, or manually with a joystick.
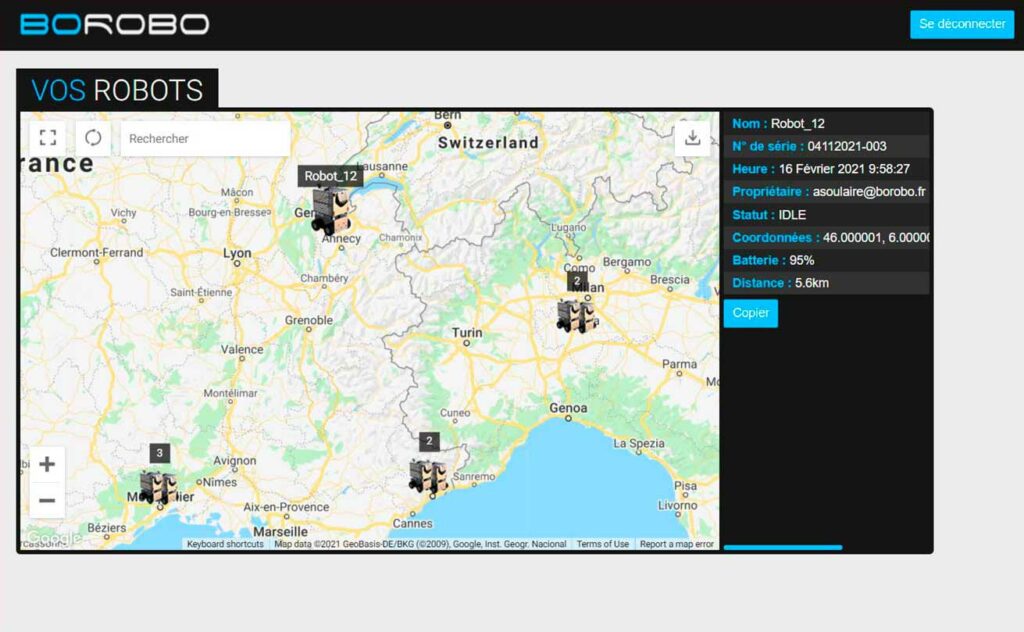
Users can control the robot via an app, and administrators can also monitor their robot fleet via a dashboard.
The robot has numerous proximity sensors, a depth camera, and two emergency stop buttons.
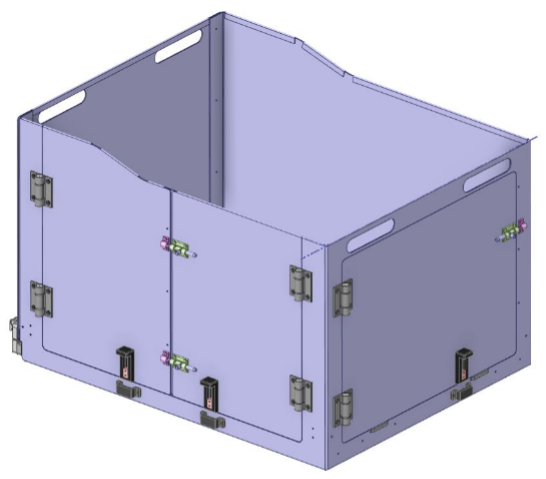
The "box" basket attaches to the mobile (tipping) plate with two clips at the front, making it easy to install and remove. This basket can be used to transport various objects (e.g., tools, bags of cement, etc.). It is washable with water.
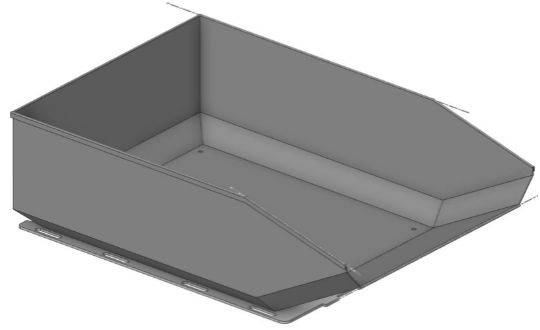
The wheelbarrow basket attaches to the mobile (tipping) plate with four mounting nuts. It can be used to transport various materials (e.g., soil, sand, liquids, etc.). It is washable with water.

Posts are ground support devices for AR_TAGs that mark the routes followed by the HELP-E robot during its autonomous outdoor navigation. Height-adjustable, the posts are supplied with their AR_TAGs ready for installation. They must be installed along the edge of the marked path at regular 10-meter intervals, or 10 posts for every 100-meter segment traveled during autonomous navigation.